Abstract
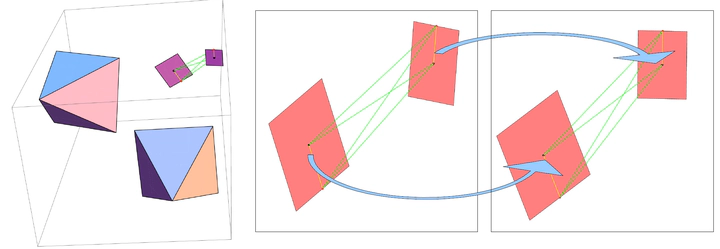
In this paper we introduce a robust matching technique that allows very accurate selection of corresponding feature points from multiple views. Robustness is achieved by enforcing global geometric consistency at an early stage of the matching process, without the need of subsequent verification through reprojection. The global consistency is reduced to a pairwise compatibility making use of the size and orientation information provided by common feature descriptors, thus projecting what is a high-order compatibility problem into a pairwise setting. Then a game-theoretic approach is used to select a maximally consistent set of candidate matches, where highly compatible matches are enforced while incompatible correspondences are driven to extinction.