Abstract
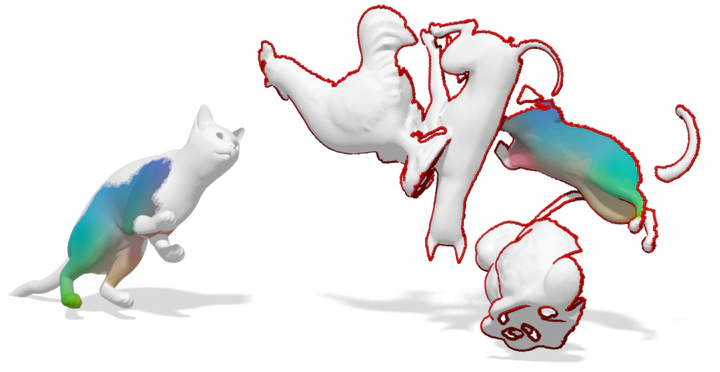
We consider the problem of deformable object detection and dense correspondence in cluttered 3D scenes. Key ingredient to our method is the choice of representation: we formulate the problem in the spectral domain using the functional maps framework, where we seek for the most regular nearly-isometric parts in the model and the scene that minimize correspondence error. The problem is initialized by solving a sparse relaxation of a quadratic assignment problem on features obtained via data-driven metric learning. The resulting matching pipeline is solved efficiently, and yields accurate results in challenging settings that were previously left unexplored in the literature.
Type
Publication
Proceedings - 2016 4th International Conference on 3D Vision, 3DV 2016