Home
News
Publications
People
NeXuS
Blog
Contact
1
Efficient Shape Matching using Vector Extrapolation
We propose the adoption of a vector extrapolation technique to accelerate convergence of correspondence problems under the quadratic …
Emanuele Rodolà
,
Tatsuya Harada
,
Yasuo Kuniyoshi
,
Daniel Cremers
Cite
PDF
URL
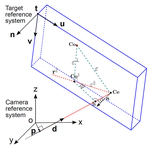
Can a fully unconstrained imaging model be applied effectively to central cameras?
Traditional camera models are often the result of a compromise between the ability to account for non-linearities in the image …
Filippo Bergamasco
,
Andrea Albarelli
,
Emanuele Rodolà
,
Andrea Torsello
Cite
PDF
URL
A game-theoretic approach to deformable shape matching
We consider the problem of minimum distortion intrinsic correspondence between deformable shapes, many useful formulations of which …
Emanuele Rodolà
,
Alex M. Bronstein
,
Andrea Albarelli
,
Filippo Bergamasco
,
Andrea Torsello
Cite
PDF
URL
Multiview registration via graph diffusion of dual quaternions
Surface registration is a fundamental step in the reconstruction of three-dimensional objects. While there are several fast and …
Andrea Torsello
,
Emanuele Rodolà
,
Andrea Albarelli
Cite
PDF
URL
Rune-tag: A high accuracy fiducial marker with strong occlusion resilience
Over the last decades fiducial markers have provided widely adopted tools to add reliable model-based features into an otherwise …
Filippo Bergamasco
,
Andrea Albarelli
,
Emanuele Rodolà
,
Andrea Torsello
Cite
PDF
URL
GitHub
A Non-Cooperative Game for 3D Object Recognition in Cluttered Scenes
During the last few years a wide range of algorithms and devices have been made available to easily acquire range images. To this …
Andrea Albarelli
,
Emanuele Rodolà
,
Filippo Bergamasco
,
Andrea Torsello
Cite
PDF
URL
Sampling relevant points for surface registration
Surface registration is a fundamental step in the reconstruction of three-dimensional objects. This is typically a two-step process …
Andrea Torsello
,
Emanuele Rodolà
,
Andrea Albarelli
Cite
PDF
URL
Loosely distinctive features for robust surface alignment
Many successful feature detectors and descriptors exist for 2D intensity images. However, obtaining the same effectiveness in the …
Andrea Albarelli
,
Emanuele Rodolà
,
Andrea Torsello
Cite
PDF
URL
Robust camera calibration using inaccurate targets
Accurate intrinsic camera calibration is essential to any computer vision task that involves image based measurements. Given its …
Andrea Albarelli
,
Emanuele Rodolà
,
Andrea Torsello
Cite
PDF
URL
A game-theoretic approach to the enforcement of global consistency in multi-view feature matching
In this paper we introduce a robust matching technique that allows to operate a very accurate selection of corresponding feature points …
Emanuele Rodolà
,
Andrea Albarelli
,
Andrea Torsello
Cite
PDF
URL
«
»
Cite
×